UltraView多模态非线性光学显微镜系统
• 多模式成像方式极大提升了图像信噪比和成像分辨率,可做无标记成像,多种成像方式包含:
• 相干拉曼,Coherent Raman scattering (CRS)
• 瞬态吸收,Transient absorption (TA)
• 二次谐波,Second harmonic generation (SHG)
• 双光子,Two-photon excited fluorescence (TPEF)
相干拉曼散射成像原理
传统拉曼的产生需要一束泵浦光(pump),然后会产生波长不同的斯托克信号(stokes)或反斯托克信号(anti-stokes),但是由于自发拉曼的信号微弱,采集时间需要几十分钟甚至是几个小时。

相干拉曼技术利用共振来放大需要检测的拉曼信号,需要同时输入两束光,除了泵浦光外,还需要与斯托克斯光同频率的入射光来产生共振;此时泵浦光能量往往会因为受激拉曼散射效应而减弱,而斯托克斯光能量则会被放大,这两种现象又分别被称为受激拉曼损耗(stimulated Raman loss, SRL)和受激拉曼增益(stimulated Raman gain, SRG),二者都属于受激拉曼散射范畴。此外还会产生一个新频率信号称为相干反斯托克斯拉曼散射CARS。

因此,相干拉曼具有两种形式,SRS和CARS。通过上述方法拉曼信号被放大,极大提升了图像信噪比和成像分辨率,而且也能做到无标记成像。
相干拉曼(CRS)的特点:
• 比自发拉曼的灵敏度提高106倍
• 无损,无标记
• 200-500 nm 成像分辨率

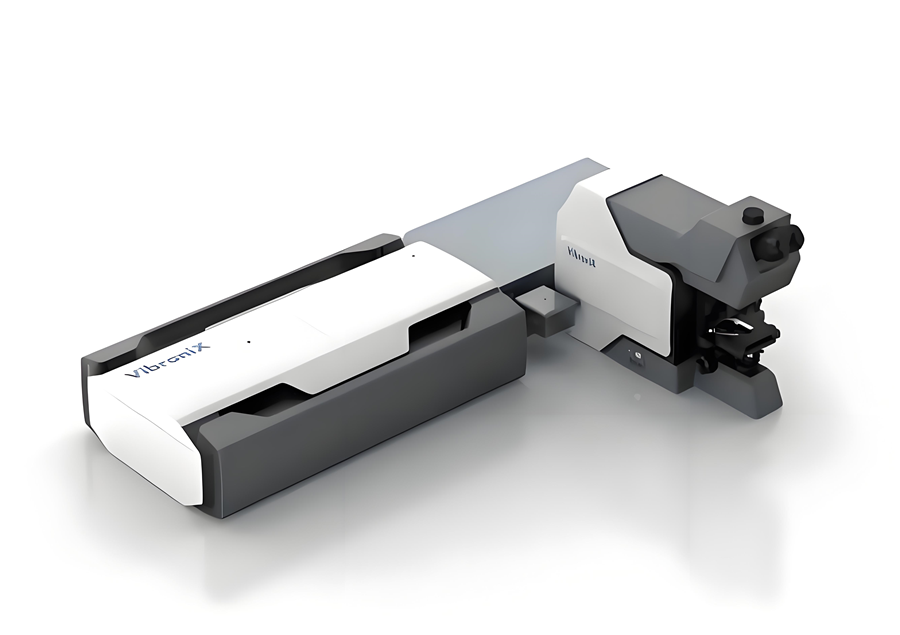
相干拉曼的应用举例

规格
| 产品名称 | UltraView | SuperView |
| 光谱分辨率 | < 17cm-1(可定制) | <25 cm-1(可定制) |
| 成像速度 | 最高可以实现10FPS刷新率(100 X 100像素) | 最高可以实现10FPS刷新率(100 X 100像素) |
| 成像空间分辨率 | ≤ 350 nm | ≤350 nm |
| 成像视野 | 600 x 600 μm (20X 物镜) | 600 x 600 μm (20X 物镜) |
| 成像软件 | 基于C++定制化开发;图形化操作界面, 可设置更改扫描步长、像素积分时间, 可实现二维、三维、长时间成像 | 基于C++定制化开发;图形化操作界面, 可设置更改扫描步长、像素积分时间, 可实现二维、三维、长时间成像 |
| 超光谱成像范围 | 800 - 3200 cm-1,包括: 指纹区(800 - 1800 cm-1) 碳氘键(2000 ‒2200 cm-1) 碳氢键区域(2800 ‒3000cm-1) | 800 - 3200 cm-1,包括: 指纹区(800 - 1800 cm-1) 碳氘键(2000 ‒2200 cm-1) 碳氢键区域(2800 ‒3000cm-1) |
| 选配 | 双光子成像 二次谐波 混合拉曼 荧光寿命成像 |

